When working with multiple sensors that provide spatial information, one needs good calibration between them so that their outputs can be aligned in one common frame. One common challenge is calibrating the extrinsics between two lidar sensors. Doing this process manually is tedious, error-prone, and sometimes involves extra materials. Instead, this can be done automatically by taking advantage of structure in the environment. I did this by fitting planes to the outputs of the individual sensors, and then finding the transform between those planes. This process can be done with a single scan from each sensor, provided that both can see three independent planes that sufficiently constrain the problem.
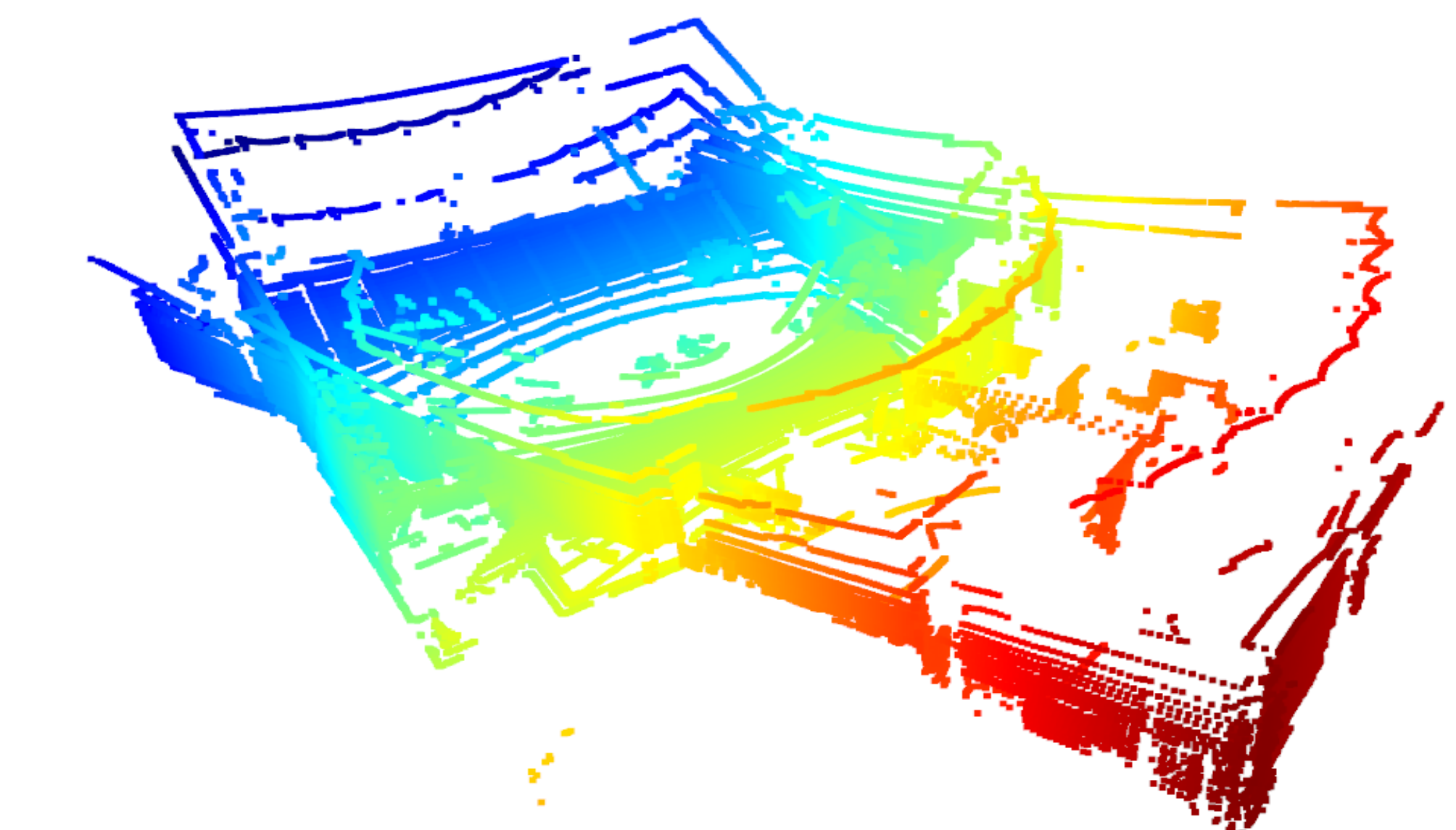
Two lidar scans overlayed on each other without proper extrinsics
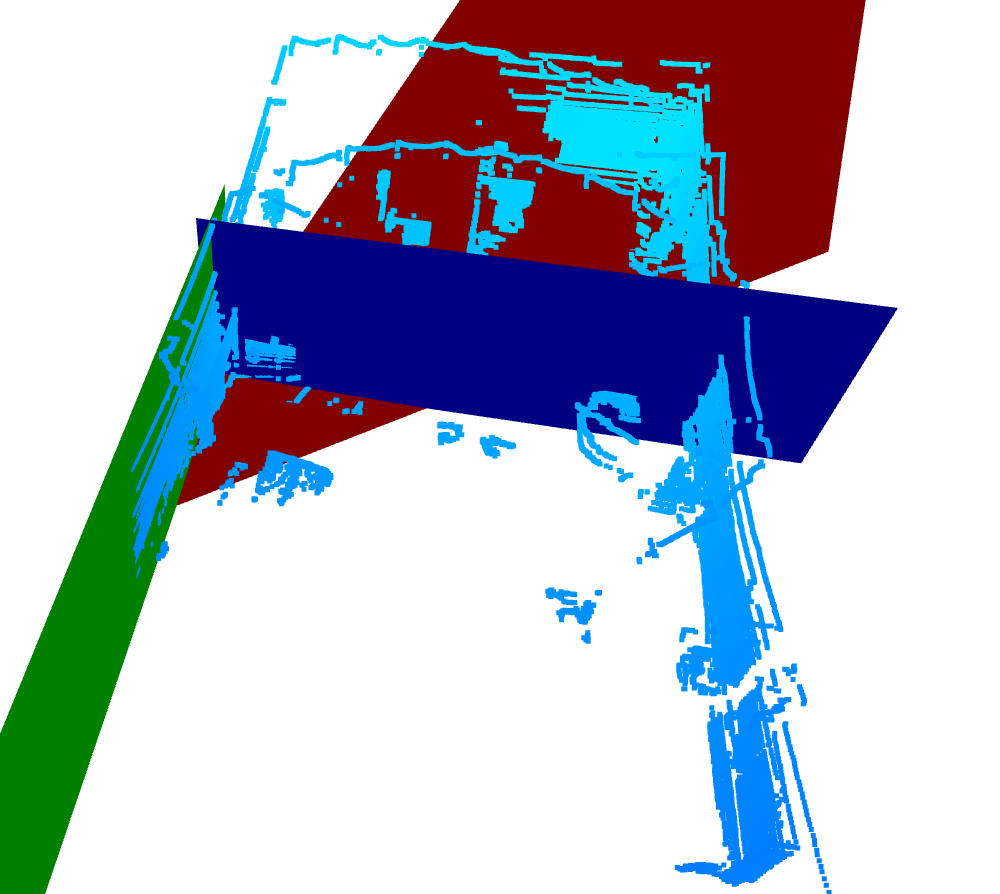
The two scans with their corresponding planes
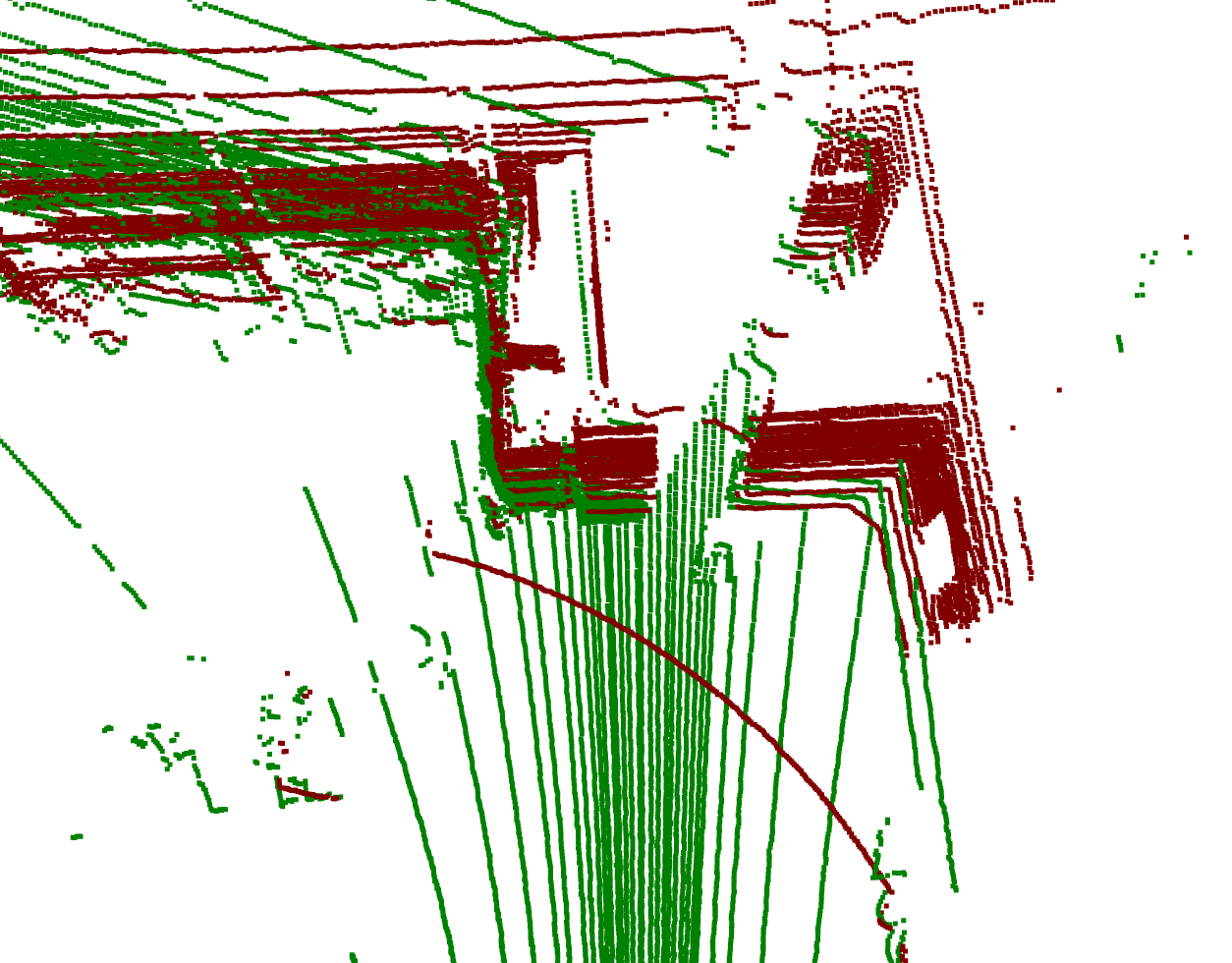

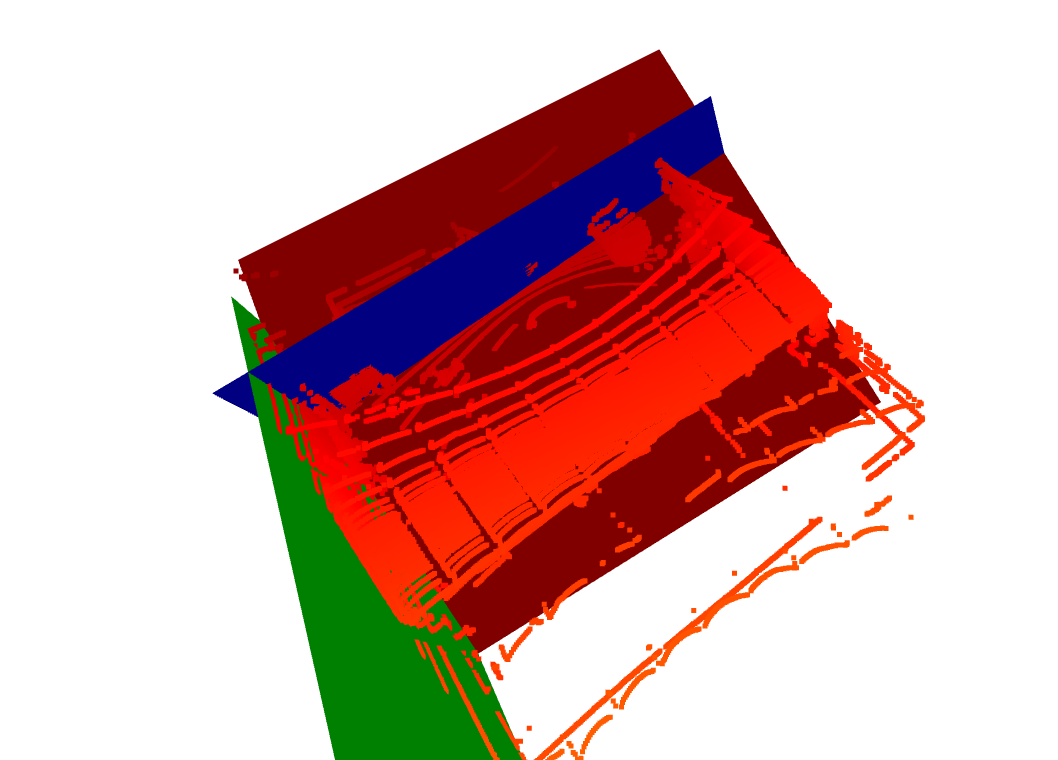
The resulting calibration