- High-level summary of my current research in autonomous off-road driving and high-speed racing
Read more
- Framework to automate the startup of modules for robot experiments/data-collection
- Maintains metadata for easy data splitting/filtering to facilitate dataset creationc
Read more
- (Ongoing) Exploring replacing our MPPI planner with a diffusion model
- Predict multi-modal path distributions efficiently.
Read more
- Initial efforts towards lidar scans from multiple perspectives (drone+car) for dense map creation and localization
- Intelligently detect and resolve discrepancies between two perspectives.
Read more
- Perception and high-level control system for drone to detect, track, and follow a person with onboard camera)
- Uses Google's Posenet and hand-designed subject-visibility metrics
Read more
- Generated a high-fidelity pointcloud of the Monza F1 Circuit via ICP-based pipeline that takes in raw lidar scans and noisy GPS information.
- Compute map features such as track boundaries, bank angles.
Read more
- A simple approach to lidar extrinsics calibration using plane fitting
Read more
- Smart baby stroller with push assist, obstacle avoidance, and more!
- Senior capstone project at Pitt.
Read more
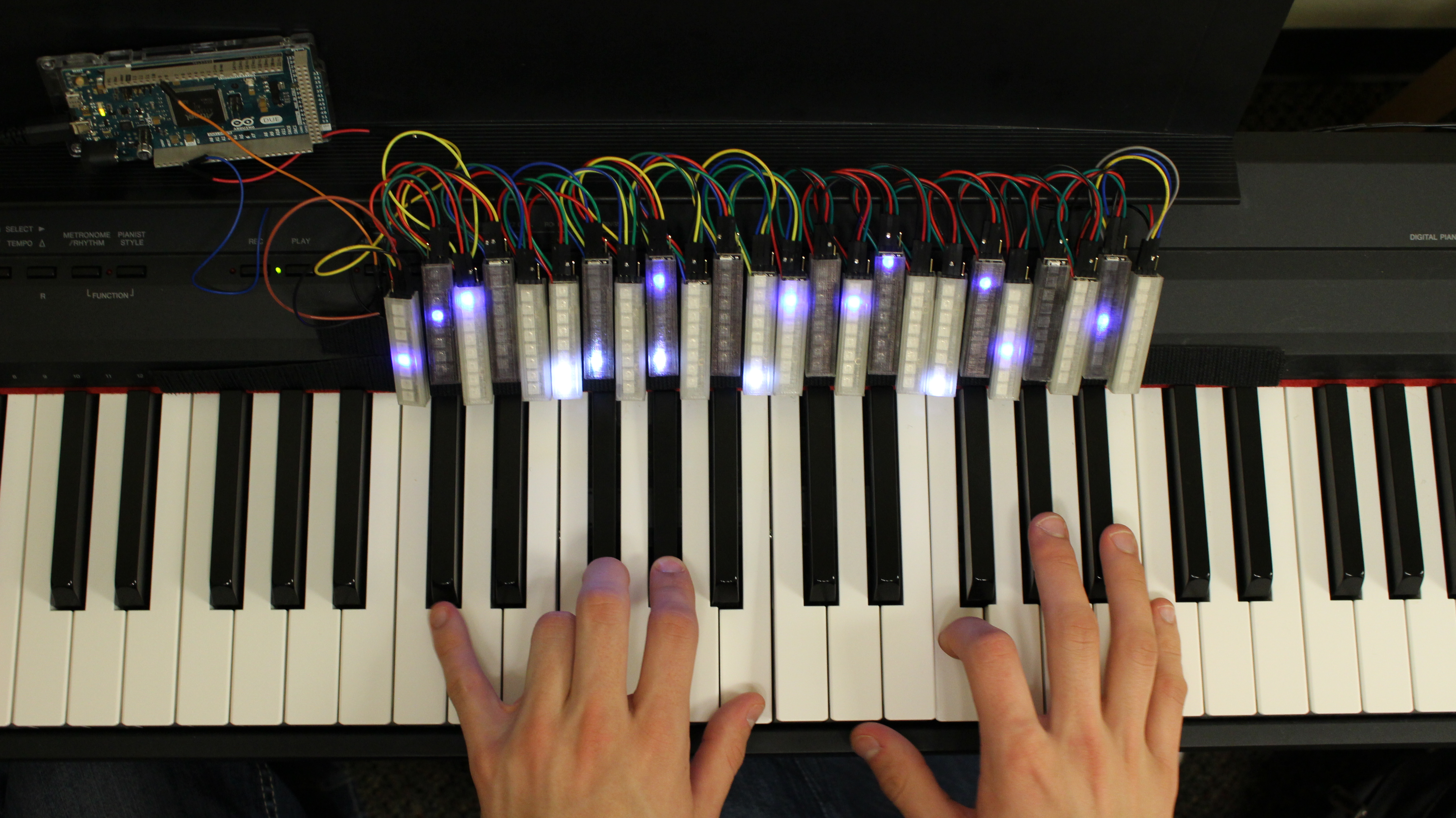
- Learn to play piano, guitar hero style!
Read more